
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Чланак за разумевање разлике између корачних мотора и серво и серво мотора
И. Разлике између корачних мотора и серво и серво мотора
Корачни мотор: представља електрични импулсни сигнал у угаоно померање или померање линије делова корачног мотора отворене петље. Једноставно речено, ослања се на електрични импулсни сигнал за контролу угла и броја окрета. Дакле, он се ослања само на пулсни сигнал да би одредио колико ротације. Пошто нема сензора, угао заустављања може одступити. Међутим, прецизан импулсни сигнал минимизира девијацију.
Серво мотор: ослоните се на серво контролни круг за контролу брзине мотора, преко сензора за контролу положаја ротације. Дакле, контрола положаја је веома прецизна. И брзина ротације је такође променљива.
Серво (електронски серво): Главна компонента серво мотора је серво мотор. Садржи управљачки круг серво мотора + сет редуктора. Ох да, серво мотор нема сет редуктора. А серво има сет редуктора.
У случају граничног серво-а, он се ослања на потенциометар испод излазног вратила да би одредио угао управљања краком кормила. Контрола серво сигнала је сигнал са модулацијом ширине импулса (ПВМ), где микроконтролер може лако да генерише овај сигнал.
ИИ. Основни принцип корачног мотора
Како то ради:
Обично је ротор мотора трајни магнет, а када струја тече кроз намотаје статора, намотаји статора производе векторско магнетно поље. Ово магнетно поље ће покретати ротор да се ротира за угао, тако да ће смер пара магнетних поља ротора бити исти као и смер магнетног поља статора. Када се векторско магнетно поље статора ротира за угао. Ротор се такође ротира за угао са овим магнетним пољем. За сваки улазни електрични импулс, мотор се ротира за један угаони корак напред. Његов излазни угаони померај је пропорционалан броју улазних импулса, а брзина ротације је пропорционална фреквенцији импулса. Променом редоследа у коме су намотаји под напоном, мотор се окреће уназад. Због тога се број и фреквенција импулса и редослед напајања намотаја сваке фазе мотора могу контролисати да би се контролисала ротација корачног мотора.
Принцип производње топлоте:
Обично видите све врсте мотора, унутрашње су гвоздено језгро и намотај. Отпор намотаја, снага ће произвести губитак, величину губитка и отпор, а струја је пропорционална квадрату, који се често назива губитком бакра, ако струја није стандардни једносмерни или синусни талас, такође ће произвести хармонијски губитак; језгро има ефекат вртложне струје хистерезе, у наизменичном магнетном пољу такође ће произвести губитак, величина материјала, струја, фреквенција, напон, што се зове губитак гвожђа. Губитак бакра и гвожђа ће се манифестовати у виду стварања топлоте, што утиче на ефикасност мотора. Корачни мотор углавном прати тачност позиционирања и излаз обртног момента, ефикасност је релативно ниска, струја је генерално већа, а хармонијске компоненте су високе, фреквенција струје се наизменично мења са брзином и променом, тако да корачни мотори генерално имају топлотну ситуацију, а ситуација је озбиљнија од општег мотора наизменичне струје.
ИИИ. Конструкција кормила
Серво се углавном састоји од кућишта, штампане плоче, погонског мотора, редуктора зупчаника и елемента за детекцију положаја. Његов принцип рада је да пријемник шаље сигнал серво, а ИЦ на плочи покреће мотор без језгра да почне да се окреће, а снага се преноси на закретну руку кроз редуктор, а у исто време детектор положаја шаље сигнал назад да утврди да ли је стигао на позиционирање или не. Детектор положаја је заправо променљиви отпорник. Када се серво ротира, вредност отпорника ће се променити у складу са тим, а угао ротације се може знати детекцијом вредности отпорника. Генерални серво мотор је танка бакарна жица омотана око трополног ротора, када струја тече кроз калем ствара магнетно поље, а периферија магнета ротора производи одбијање, што заузврат генерише силу ротације. Према физици, момент инерције објекта је директно пропорционалан његовој маси, па што је већа маса предмета који треба да се ротира, потребна је већа сила. Да би се постигла велика брзина ротације и ниска потрошња енергије, серво је направљен од танких бакарних жица уплетених у веома танак шупљи цилиндар, формирајући веома лаган шупљи ротор без полова, а магнети су смештени унутар цилиндра, који је мотор са шупљом чашом.
Да би одговарали различитим радним окружењима, постоје серво уређаји са водоотпорним дизајном и дизајном отпорним на прашину; а као одговор на различите захтеве за оптерећење, постоје пластични и метални зупчаници за серво, а метални зупчаници за сервос су генерално високог обртног момента и велике брзине, са предношћу што се зупчаници неће ломити због превеликих оптерећења. Сервоси вишег квалитета ће бити опремљени кугличним лежајевима како би ротација била бржа и тачнија. Постоји разлика између једног кугличног лежаја и два куглична лежаја, наравно да су два куглична лежаја боља. Нови ФЕТ серво углавном користе ФЕТ (Фиелд Еффецт Трансистор), који има предност ниског унутрашњег отпора и стога мањег губитка струје од нормалних транзистора.
ИВ. Серво принцип рада
Од пвм таласа у унутрашње коло да генерише пристрасни напон, генератор контактора кроз редукциони зупчаник покреће потенциометар да се креће, тако да када је разлика напона нула, мотор се зауставља, како би се постигао ефекат серво.
Протоколи за серво ПВМ су сви исти, али најновији серво који се појављују могу бити другачији.
Протокол је генерално: ширина високог нивоа у 0,5 мс ~ 2,5 мс за контролу серво-а да се окреће под различитим угловима.
В. Како раде серво мотори
На слици испод приказано је управљачко коло серво мотора направљено са оперативним појачалом снаге ЛМ675, а мотор је ДЦ серво мотор. Као што се може видети са слике, оперативни појачавач снаге ЛМ675 се напаја са 15В, а напон од 15В се додаје на инфазни улаз операционог појачавача ЛМ675 кроз РП 1, а излазни напон ЛМ675 се додаје на улаз серво мотора. Мотор је опремљен генератором сигнала за мерење брзине за детекцију брзине мотора у реалном времену. У ствари, генератор сигнала брзине је врста генератора, а његов излазни напон је пропорционалан брзини ротације. Излазни напон из генератора сигнала за мерење брзине Г враћа се назад на инвертујући улаз операционог појачавача као сигнал грешке брзине након кола за разделник напона. Вредност напона постављена потенциометром за команду брзине РП1 додаје се на инфазни улаз операционог појачавача након дељења напона са Р1.Р2, што је еквивалентно референтном напону.
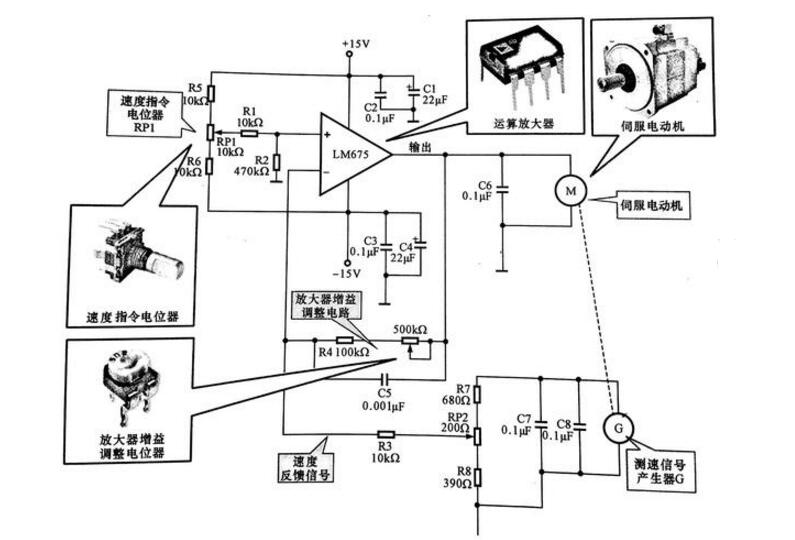
Управљачка шема серво мотора
Сервомотор: Означен словом М за сервомотор, он је извор енергије за погонски систем. Оперативно појачало: означено именом кола, тј. ЛМ675, је део појачала у серво управљачком колу који обезбеђује погонску струју за серво мотор.
Потенциометар команде брзине РП1: Подешава референтни напон операционог појачавача у колу, тј. подешавање брзине. Потенциометар за подешавање појачања појачала РП2: Користи се у колу за фино подешавање појачања појачала и величине повратног сигнала брзине, респективно.
Када се оптерећење мотора промени, мења се и напон који се враћа на инвертовани улаз операционог појачавача, односно када се повећа оптерећење мотора, брзина се смањује, а излазни напон генератора сигнала брзине такође се смањује, тако да се напон на инвертованом улазу операционог појачавача смањује, а разлика између овог радног напона и референтног излазног напона повећава се. Супротно томе, када оптерећење постане мање и брзина мотора расте, излазни напон генератора сигнала за мерење брзине расте, напон повратне спреге који се додаје на инвертовани улаз операционог појачавача се повећава, разлика између овог напона и референтног напона се смањује, излазни напон операционог појачавача се смањује, а брзина мотора се смањује у складу са тим, тако да се може аутоматски стабилизовати подешена вредност на рота.


